We are in the business of developing robotics, sensors, and other innovative technologies. We solve real-world problems yielding products with demand. Click on one of the pictures below to explore our Featured Projects.
-
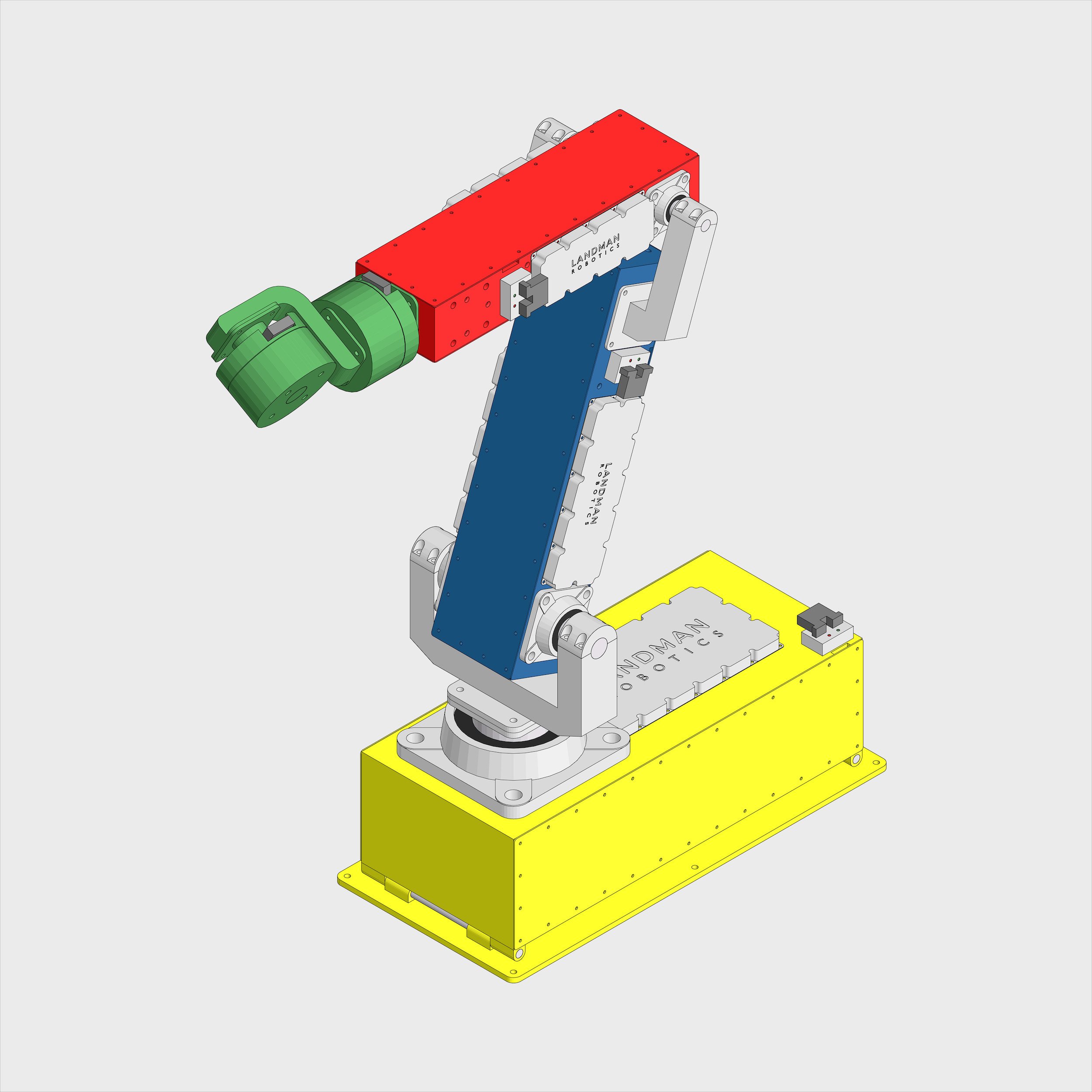
By far the biggest barrier to entry is the exorbitant price of industrial robotics. If one can create a more cost-effective robotic solution, without compromise on performance, a market would be realized. As a result, we established Landman Robotics.
Our current aim is to develop an industrial robotic arm with excellent accuracy, but at a much lower price bracket compared to current robotics. Our objective is to create a robotic arm with a 2m reach and positional end effector accuracy of 0.5mm. A tall order, as similar industrial robots commonly achieve a positional end effector accuracy of about 1mm.
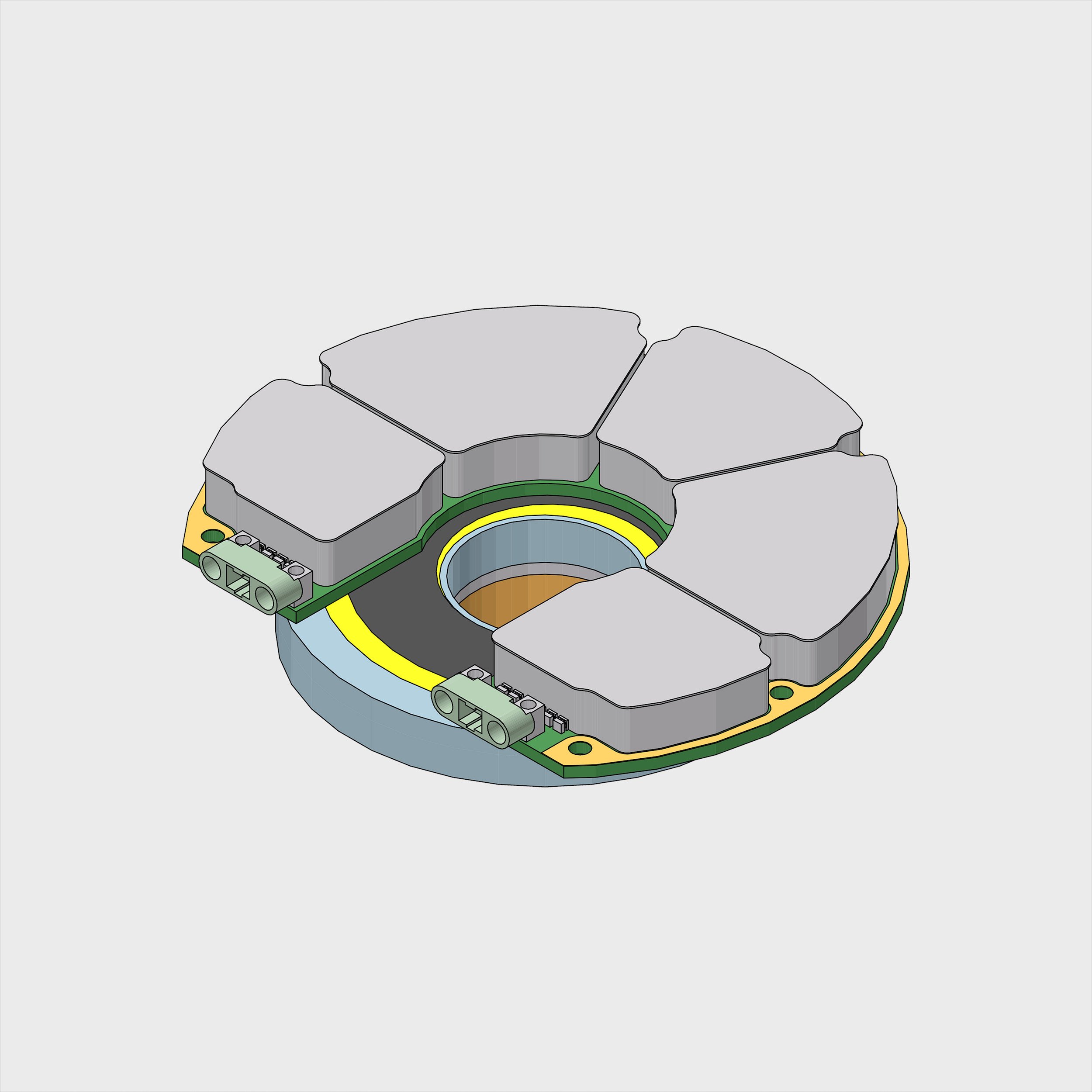
Achieving 0.5mm proved to be very challenging, but also very rewarding. Rewarding in that many innovative technologies developed out of the challenge. One, in particular, is a new kind of angular encoder developed by us, the MFEA Encoder. It was found that our MFEA Encoder ADM3 model outperforms current best-in-class encoders available on the market.
Our MFEA Encoder measures angle accurately and reliably in a novel way and can do so in harsh environments. Best-in-class encoders can work reliably in harsh environments but do not reach the accuracy achieved by our MFEA Encoder. Our long-term goal is still to develop cost-effective industrial robotics, but currently, we are focusing all efforts on the MFEA Encoder as it proved to have great market potential.
We are currently in the process of further developing our MFEA technology to eliminate the need to calibrate the sensor. Our latest design is based on the same principles of operation used in the MFEA Encoder ADM3 model but includes a complex algorithm designed to automatically determine the relative alignment of the axle. The MFEA Encoder ADM6 model will be able to accommodate sizeable radial and axial misalignments in the order of ±1° and ±2 mm respectively. The sensor will actively calibrate itself, negating the need to calibrate the sensor.
Development of the MFEA Encoder ADM6 model is nearing completion and we expect a working prototype to be completed by end-2023.